Toto je první díl ze tří – úvodního kurzu Micropython na ESP32. Nejedná se ani o výuku programování, ani o úzké zaměření na elektroniku. Naší snahou je jednoduchou formou přiblížit aktuální možnosti elegantních a dostupných zařízení. Pokud si po přečtení článku i něco sami vyzkoušíte, určitě vám to přinese víc.
Několik let se zaměřujeme na vývoj elektronických zařízení – a naši pozornost neustále směrujeme k nejmodernějším technologiím. Zabýváme se virtuální realitou, umělou inteligencí, zařízeními pro internet věcí, technologií blockchainu, mechatronikou a robotikou… Řešíme hardware i software a pokaždé přemýšlíme, jak si co nejvíce usnadnit práci. Jak zefektivnit výrobu prototypů a jak přilákat nové zájemce o toto nové a ne úplně jednoduché odvětví. Vytvořili jsme proto elektronické moduly i programové rozhraní, které sami efektivně využíváme.
Námi navržené vývojové a experimentální moduly slouží i jako finálně zapojitelné prvky pro projekty nebo jejich části. Jednoduché (nebo částečně zapojené) projekty výborně pomáhají i při výuce.
Představeno v článku: https://chiptron.cz/articles.php?article_id=233
Na co se v tomto díle zaměříme?
1. HW – ESP32
2. FW – Micropython
3. SW – Začínáme – ukázky programování elektronického zařízení
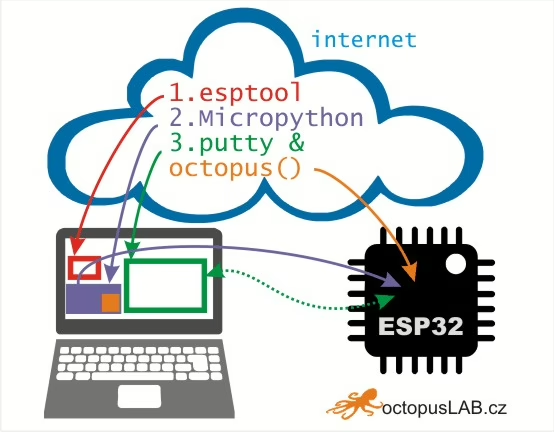
Pomocí nástroje ESPTOOL nahrajeme Micropython do ESP.
Pak přes terminál Putty dokončíme instalaci systému octopus()
Pro základní pokusy s Micropythonem na ESP32 potřebujete „pouze“ modul ESP32, do kterého si „naflashujete“ Micropython. Zní to jednoduše, ale pro mnohé začátečníky je to tou nejnáročnější částí kurzu.
Pro ulehčení další práce jsme připravili modul se souborem knihoven, který nazýváme octopus(). V dalších ukázkách už bude nezbytný.
Tento modul si společně s Micropythonem nahrajete a nakonfigurujete podle následujícího odkazu: https://www.octopuslab.cz/micropython-octopus/
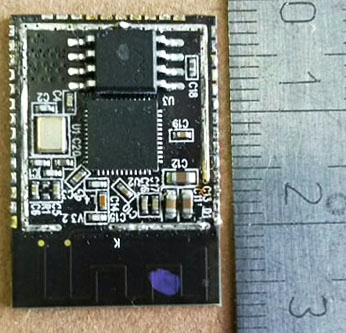
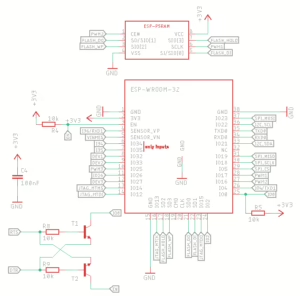
1. ESP 32 – WROOM

ESP32 – WROOM od společnosti Espressif| Mikrokontrolér, kontrolér, nebo „známka“
– výrazy, které používáme pro označení „srdce“ tohoto modulu.
Na destičce o velikosti poštovní známky je mikrokontrolér spolu s několika klíčovými komponenty včetně krystalu, leptané antény a impedančního přizpůsobení. Tím usnadňují použití ESP32 a jsou okamžitě připraveny k integraci do koncových produktů.
Co ukrývá ESP32 pod plechovým krytem
ESP32 má:
– dvě CPU jádra s nastavitelnou taktovací frekvencí do 240 MHz
– klasické Bluetooth i podporu Bluetooth Low Energy (BLE)
– 4MB Flash paměť
– 3 bloky paměti RAM v celkové velikosti 520kB
– periferie zahrnují kapacitní dotykové senzory, Hallův snímač, zesilovač s nízkým šumem, rozhraní pro SD kartu, Ethernet, vysokorychlostní SPI, UART, I2S a I2C
Takže má dostatečný výkon, aby na něm mohl běžet i robustnější systém, jako je Micropython.
2. Micropython

Micropython je zjednodušenou verzí programovacího jazyka Python. Je to open-source převážně psaný v jazyce C. Jeho zdrojové kódy jsou dostupné na: https://github.com/micropython/micropython
Poznámka: Toto není výuka Micropythonu – ale jen ukázky a experimenty s přihlédnutím na interakci s vybraným HW. Pro podrobnější proniknutí do tajů programování v Pythonu doporučujeme:
> https://naucse.python.cz/course/mi-pyt/intro/micropython/
> http://howto.py.cz/index.htm
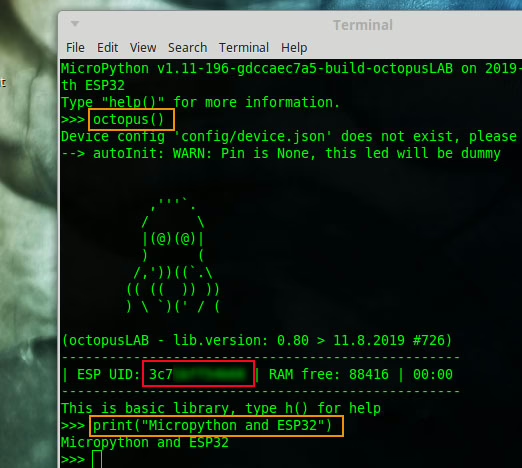
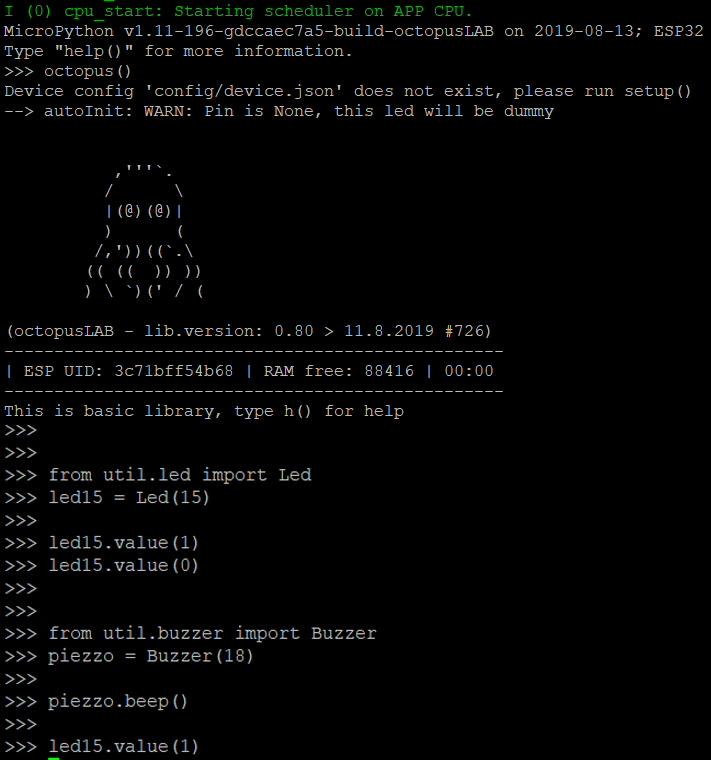
Po zadání octopus() se provede inicializace a systém vypíše základní informace.
Například unikátní číslo ESP – v červeném rámečku, které jsme záměrně rozmazali.
V dalších dílech se dozvíte proč.
No a základní příkaz print(„Hello world“) jsme tedy také nevynechali.
Základní ukázky a experimentování se provádí v interaktivním modu.
To znamená, že mikrokontrolér vykonává přímo příkazy psané v Pythonu (aniž by je kompiloval) a ke komunikaci využíváme emulátor terminálu (příkazové řádky) putty nebo screen (v Linuxu a pro Mac)
– výhoda: jednoduché, nemusí se kompilovat a hned běží
– nevýhoda: drží se v paměti jen po dobu napájení, po vypnutí se vše „zapomene“ – a tak není vhodné pro složitější programy nebo větší projekty s více soubory.
– Řešení: programovat mimo kontroler a až pak program nahrát jako soubor nebo spustit přes ampy run, případně přes webrepl.
3. Začínáme – první pokusy
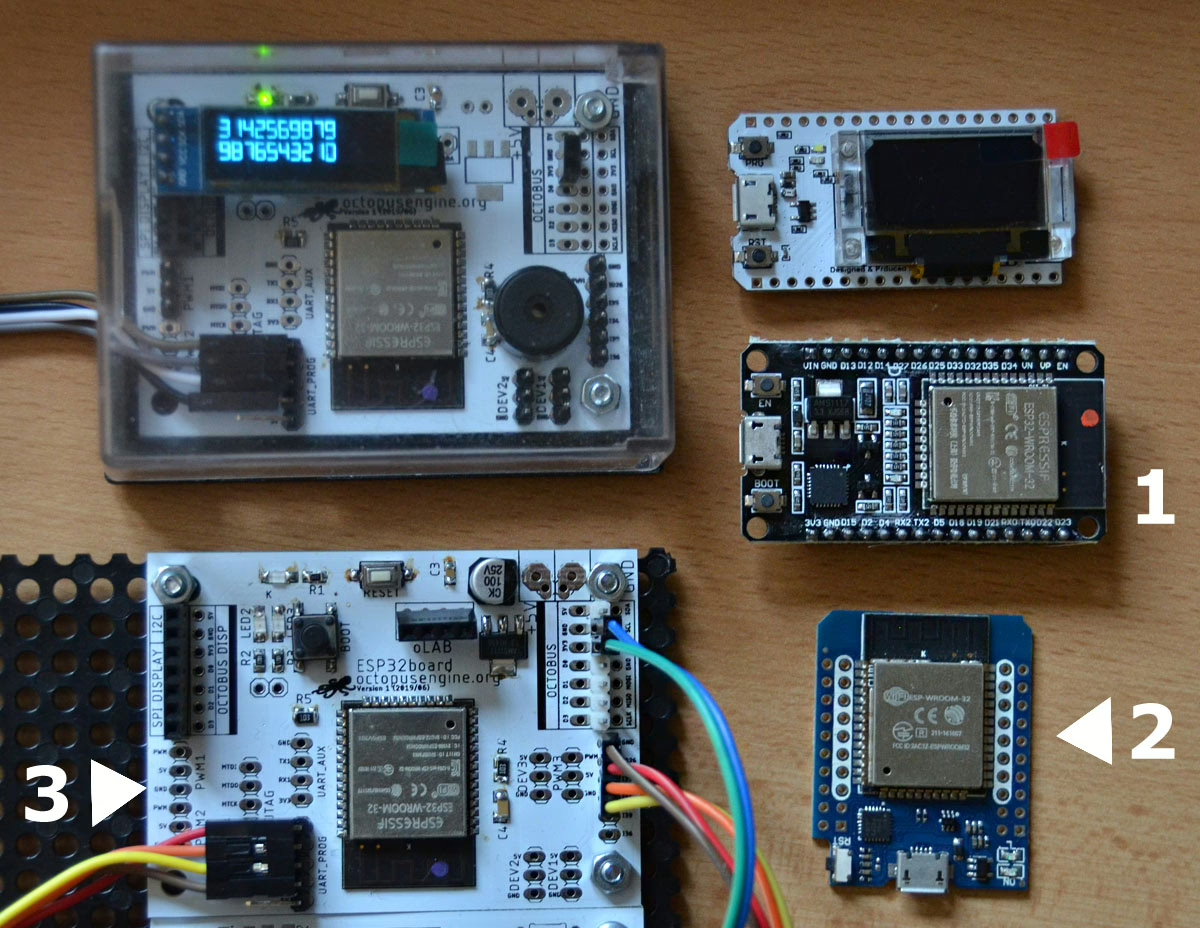
ESP moduly – používáme nejčastěji 1) 2×15 pinů
2) Wemos 4×10 pinů 3) octopusLAB ESP32board
Klávesové zkratky terminálu, které budeme občas potřebovat:
základem je CTRL-C pro přerušení běžícího programu
a CTRL-D pro soft reset kontroléru, celý přehled z helpu:
Control commands:
CTRL-A — on a blank line, enter raw REPL mode
CTRL-B — on a blank line, enter normal REPL mode
CTRL-C — interrupt a running program
CTRL-D — on a blank line, do a soft reset of the board
CTRL-E — on a blank line, enter paste mode
——————————————————–
REPL = Read–eval–print loop
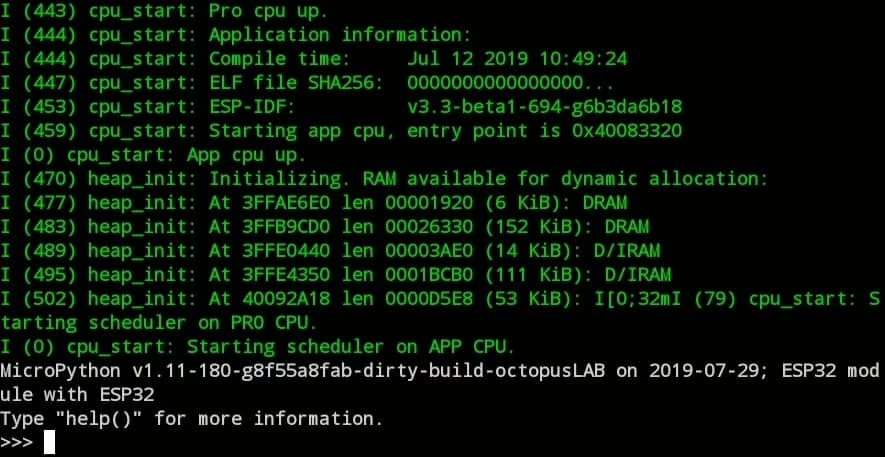
Úvodní obrazovka Micropythonu v terminálu.
(Například po stisknití tlačítka RESET -> soft reboot)
Rychlý úvod do Pythonu
>>>
">>>" toto je takzvaný "prompt",
terminálová výzva, abychom tam něco napsali:
příkaz nebo "posloupnost příkazů"
>>> a = 123
do proměnné se uložila hodnota (číslo 123)
>>> a
123
vytiskne / zobrazí hodnotu proměnné
nebo print(a) pokud to chcete použít v programu
>>> a + 10
133
zobrazí vypočtenou hodnotu (jako kalkulačka)
někdy chceme složitější matematické výrazy, než je
+ sčítání
- odčítání
* násobení
/ dělení
>>> import math
importujeme knihovnu, až když jí potřebujeme,
jinak nám zbytečně blokuje operační paměť
>>> math.log10(1000)
3.0
>>> math.pi
3.141593
počet desetinných míst je omezený
*) pouze v této úvodní části jsme naznačili, co píše systém (tučně) a co píšete vy (normálně) - poznámky pak píšeme šikmo
>>> šipky nahoru nebo dolů -> historie příkazů
>>> metoda + tečka > TAB doplnění / nápověda
zkuste například:
>>> import math
>>> math. a po tečce stisknout TAB > vypíše vám:
__class__ __name__ pow acos
acosh asin asinh atan
atan2 atanh ceil copysign
cos cosh degrees e
erf erfc exp expm1
fabs floor fmod frexp
gamma isfinite isinf isnan
ldexp lgamma log log10
log2 modf pi radians
sin sinh sqrt tan
tanh trunc
Micropython má obrovskou výhodu v tom, že běží jako interpret: když uživatel napíše název proměnné, třídy nebo instance objektu, skoro všechno se o nich můžeme dozvědět. Právě proto máme k dispozici všechny metody, po
"tečka TAB".
TAB tedy slouží i jako "nápověda" nebo pro efektivní našeptávač pro dokončování příkazů, což s jistou praxí může znatelně urychlit práci z "komand-lajny" (podobně jako v Linuxu)
Nové funkce se dají definovat z příkazové řádky
Více řádkové "dočasné definice vlastních funkcí":
def název(parametry):
nezapomenout na dvojtečku!
>>> def suma(x, y):
... return x + y
Pozor na odsazení druhého řádku a důsledné zarovnávání logických bloků.
Ukončení definice lze nejrychleji "uENTRováním" (lépe po BACKSPACE).
...
...
>>>
a zkusíme, jak nám nová funkce funguje:
>>> suma (1, 2)
3
Lambda - pro jednoduché funkce:
>>> sumaL = lambda a, b: a + b
>>> sumaL(1, 2)
3
Jsou situace, kde je potřeba funkce na jedno použití někde uvnitř jiné funkce. Převážně k tomu se lambda funkce používá.
Nám se to ale může hodit pro rychlé jednořádkové definice z konzole.
Standardní knihovna a knihovna esp32
některé základní funkce z standardní knihovny
čekací prodlevy:
program bude pokračovat až po uplynutí dané doby
from time import sleep > již je v octopus()
sleep(1) > 1 sekunda pauza
sleep_ms(100) > 100 mili sec
sleep_us(500) > 500 micro sec
teplota u procesoru:
>>> import esp32
>>> esp32.raw_temperature()
127
hallova sonda - magnetického pole:
>>> import esp32
>>> esp32.hall_sensor()
129
cca standard hodnota
>>> esp32.hall_sensor()
976
po přiložení magnetu
Ještě drobná vsuvka - cykly a podmínky zmíníme v další části, ale už nyní používáme jednu základní formu: "nekonečný cyklus"
while podmínka:
... prováděj_pokud_je_splněná_podmínka()
a = 0
while True:
... a += 1
... print(a)
v nekonečné smyčce maximální rychlostí vypisuje obsah zvětšující se proměnné "a"
Pro další práci už využijeme i octopus()
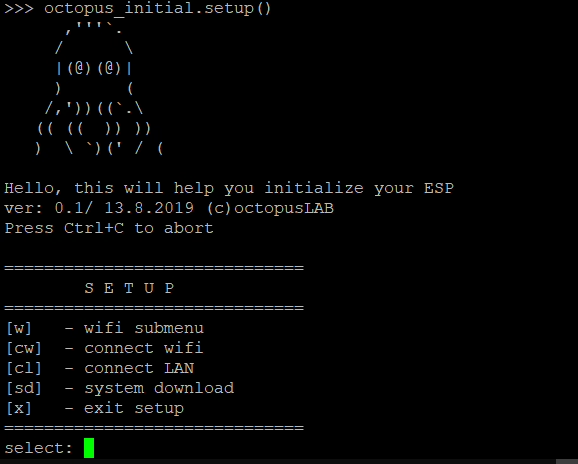
Pokud máte octopusLAB verzi Micropythonu, máte ulehčenou práci – stačí zadat: octopus_initial.setup()
pak nastavit wifi, připojit se a následně z cloudu stáhnout celý systém.
Vše bylo již popsáno v návodu instalace systému.
Objektové programování? Trochu teorie:
Všechno v Pythonu je objekt. Základní vlastností těchto abstraktních objektů je to, že obsahují jak data (informace), tak chování – instrukce nebo-li metody, které s těmito daty pracují. To se nám náramně hodí pro zjednodušení programování objektů reálného světa.
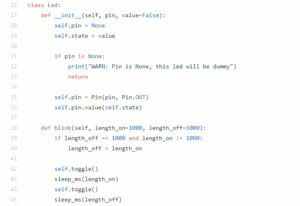
To, co je pro programátory základní úlohou "zobrazit HELLO WORLD", je ve světě číslicové techniky "blikání LEDkou". Svítivou diodu (LED) vám podrobněji představovat asi nemusíme. Stačí vědět, že je to malá elektronická součástka, kterou když teče proud - tak svítí.

V Pythonu pak můžeme mít vytvořen objekt "Led" (s velkým počátečním písmenem) jehož definice vychází z obecného objektu Pin. A my si k němu přidáme další metody, které se nám v projektech mohou hodit - například "blink()" pro blikání - metoda má závorky, buď prázdné nebo s případnými parametry.
Pak bychom si práci s periferiemi představovali nějak takto:
led = Led() vytvoření instance objektu Led
led.value(1) > instance objektu "tečka" metoda "( parametry )"
zde: hodnota (value) s parametrem 1 znamená, že se LEDka rozsvítí.
Chceme jinou Led? Na jiném pinu? Vytvoříme instanci objektu:
led2 = Led(pin) > a pak ji používáme "stejně":
led2.value(1)
Na rozdíl od proměnné: "a = 123" metoda nebo funkce data získá nebo na základě parametrů zpracuje, proměnná je obsahuje.
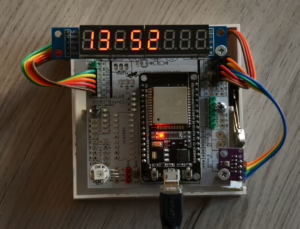
Blikáme, pípáme – základ práce s periferiemi
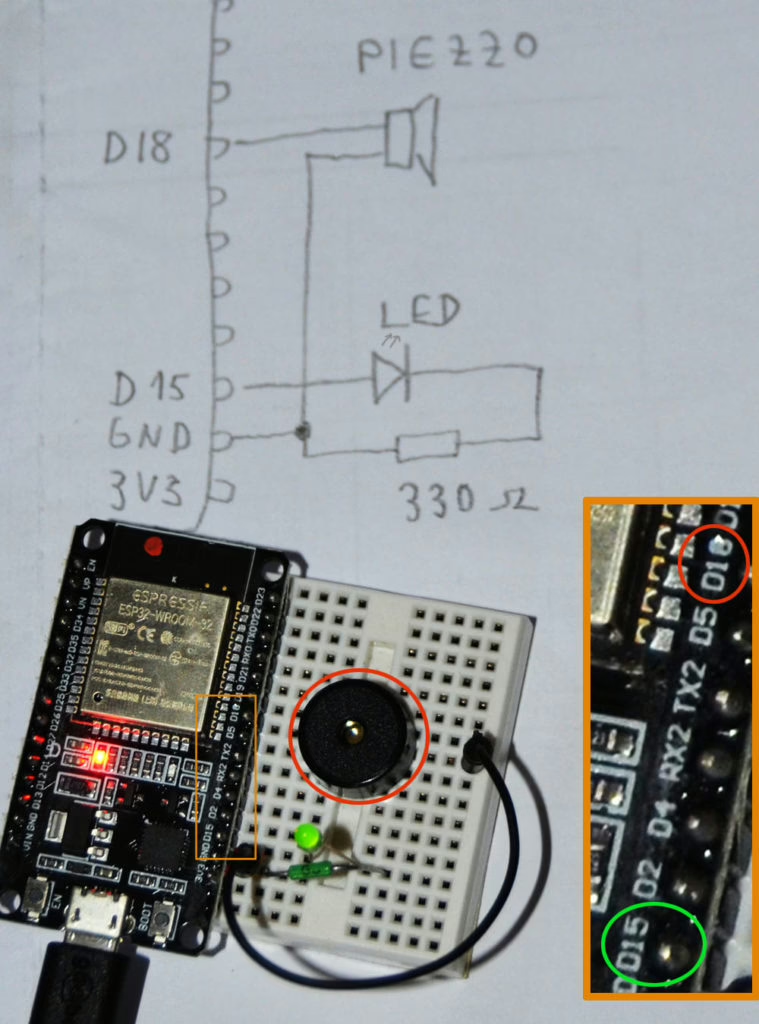
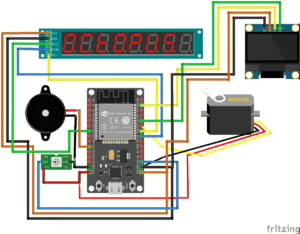
Zatím jen pomocí propojovacích drátků jsme k modulu ESP připojili LED diodu
(přes odpor 220 na pin 15) a piezzo pípák (přímo na pin 18 a zem)
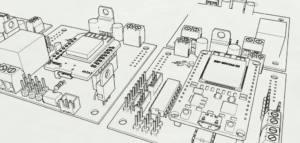
Od rukou kresleného nápadu – k zapojení…
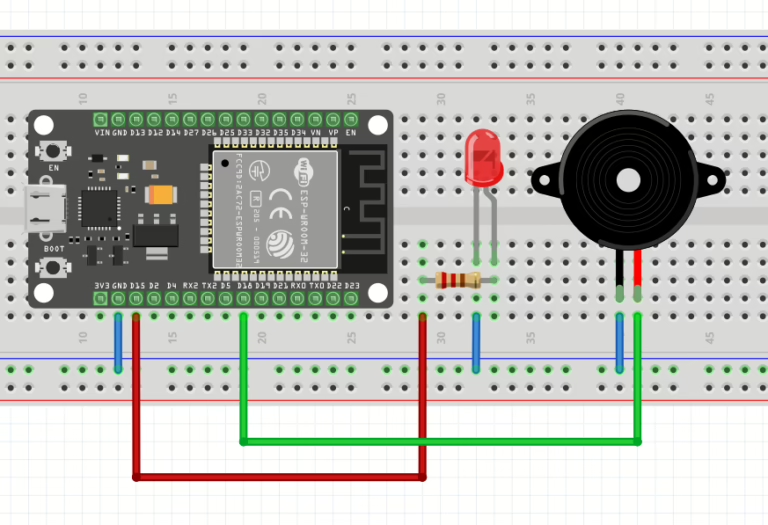
To samé – trochu „líbivěji“. v programu Fritzing, což je opensource pro kreslení jednoduchých „schemat“ zapojení – i pro návrh plošných spojů.
Stejně jak máme připojeno, musíme jednotlivé piny inicializovat (definovat) v Micropythonu.
Nezapomeňte před tím spustit hlavní „modul“ příkazem octopus()
Práce s octopus() „modulem“ s ROBOTboard
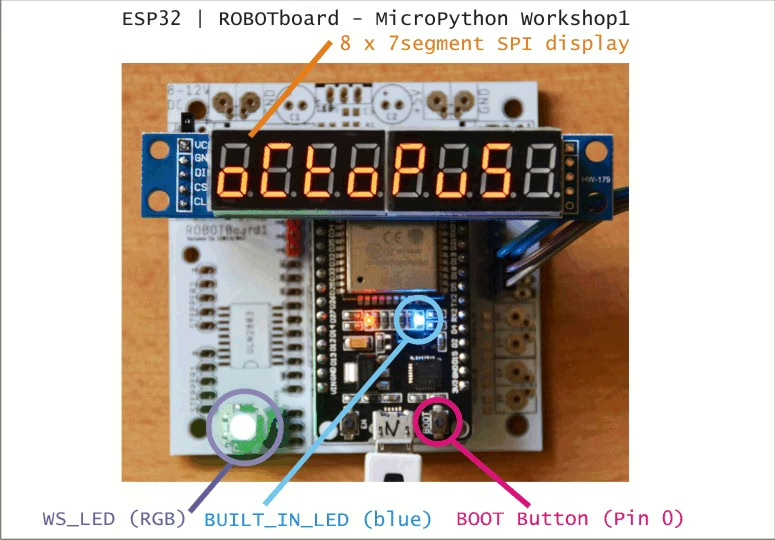
My používáme modul na desce ROBOTboard, ale pro úvodní pokusy ho nepotřebujete.
Modrá kontrolní LEDka a barevná RGB LED je pod naší kontrolou.
Tlačítko boot se dá také použít – což si ukážeme v dalším díle.
octopus()
nezapomínejte spustit hlavní modul knihoven
po každém novém zapnutí a po resetu
Ukážeme si tři základní třídy: Led, Buzzer a Rgb
včetně odkazů na zdrojové kódy
třída Led > zdrojový kód
led = Led(2)
instance objektu Led s defaultním nastavením na pinu 2
(což je BUILT_IN_LED - vestavěná modrá LEDka)
led.value(1)
nastavení hodnoty na "1" - dioda svítí
led.value(0)
nastavení hodnoty na "0" - dioda nesvítí
blikání poprvé:
while True:
... led.value(1)
... sleep(1)
... led.value(0)
... sleep(1)
led.value()
bez parametru vrátí hodnotu nastavení - nyní tedy: 0
led.toggle()
"přepnout" > změní stav - nyní tedy z 0 na 1
blikání podruhé:
while True:
... led.toggle()
... sleep(1)
led.blink()
metoda pro jedno bliknutí blink()
default parametry: 1s svítí a 1s nesvítí
(což si sami najdete ve zdrojových kódech)
led.blink(1000,500)
metoda blink (s parametry: 1s svítí a 0.5s nesvítí)
parametr se zadává v milisekundách
blikání potřetí:
while True:
... led.blink()
a právě tento příklad máme jako základní ukázku ve složce "examples":
https://github.com/octopusengine/octopuslab/blob/master/esp32-micropython/examples/blink.py
led2 = Led(33)
instance objektu Led na pinu 33
...
třída Buzzer > zdrojový kód
piezzo = Buzzer(18)
piezzo.beep()
napřímo přes octopus():
beep()
základní pípnutí (1000,50) > 1kHz na 50ms
beep(440,500)
komorní a 440Hz na 0.5s
from util.buzzer import notes
Notes.A4
440
k dispozici jsou tóny C3-C7
tone(440) => buzzer.play_tone(Notes.A4)
from util.buzzer import melody
piezzo.play_melody(melody.mario)
třída Rgb > zdrojový kód
ws = Rgb()
deklarace základu je provedena už spuštěním octopus()
ws = Rgb(32,8)
na pinu 32 máme 8 ws LEDek
ws.num
8
nám vrátí property (vlastnost, proměnnou: počet LEDek),
a vrátí 8, protože jsme nastavili 8 (systém to jinak nepozná)
ws.simpletest()
jednoduchý test, na první LED postupně R > G > B
ws.color(RED)
ws.color((128,64,0))
možnosti zadání barvy
from util.rgb import wheel
metoda wheel konvertuje číslo na posouvané RGB
>>> wheel(10)
(225, 30, 0)
>>> wheel(50)
(105, 150, 0)
chceme blikat náhodnými barvami?
from util.rgb import random_color
while True:
... ws.color(random_color())
... sleep(0.3)
....
Barva podle tweetu?
Pokud jste si stáhli octopus-verzi Micropythonu a nastavovali WiFi podle návodu, využijeme skvělé vlastnosti robustnějšího systému (oproti C).
Micropython umí pracovat se soubory, a přímo pracovat nejen se řetězci znaků, ale i s json formátem nebo jednoduchou databází. Všechny nastavené WiFi jsou tedy strukturovaně uložené ve vašem ESP v json-souboru:
config/wifi.json
chcete vidět co tam je? Zadejte:
(octopus() nemusíte pokaždé, stačí jen po restartu, ale start navíc ničemu neublíží, RAM se průběžně optimalizuje automaticky)
octopus()
f("config/wifi.json")
f jako file vám obsah souboru vypíše
Pro připojení k wifi nám stačí:
octopus()
w()
Na závěr dnešního dílu si ukážeme využití "api třetích stran" - webovou aplikaci, která aktualizuje RGB nastavení podle twitteru:
http://api.thingspeak.com/channels/1417/field/2/last.txt
Když publikujete například zprávu:
#octopusLAB and #micropython example
#cheerlights orange
výše uvedený odkaz zaktualizuje svůj stav na poslední publikovanou barvu
za hashtagem #cheerlights
do knihoven octopus (ve složce ukázek examples) jsme implementovali jednoduchou metodu twitter_rgb(), takže vám stačí zadat pouze pár řádků:
>>> octopus()
>>> w()
>>> from examples.twitter_rgb import twitter_rgb
>>> ws.color(twitter_rgb())
inicializace octopus, připojení k wifi, natažení knihovny a jednorázové spuštění příkazu
a RGB LEDka vám svítí podle posledního tweetu
Pokud chcete průběžnou aktualizaci, nedávejte to v nekonečné smyčce bez prodlevy, server umlátíte nereálným http dotazováním několikrát za vteřinu, což je krok regulernímu DDoS útoku (Distributed Denial of Service) takže vás záhy nejspíš odpojí
while True:
... ws.color(twitter_rgb())
... sleep(30)
kompromis, každých 30 vteřin, stejně rychleji tweetovat nebudete
zdrojový kód > https://github.com/octopusengine/octopuslab/blob/master/esp32-micropython/examples/twitter_rgb.py
Odkazy:
https://www.octopuslab.cz/micropython-octopus/
http://docs.micropython.org/en/latest/esp32/quickref.html
https://naucse.python.cz/
https://naucse.python.cz/course/mi-pyt/intro/micropython/
http://howto.py.cz/index.htm
https://www.octopuslab.cz/vyvojove-desky/robot-board/
https://chiptron.cz/articles.php?article_id=233
https://www.dfrobot.com/blog-692.html



{kind=link}
{kind=link}
Žádné sociální komentáře k dispozici.