Níže uvedený článek je článek přeložený ze stránek dfrobot.com.
Připravte se na léto s vlastním větráčkem.
Koupil jsem malý větrák z internetu. Je dobrý, jen není řiditelný.
Nicméně, je to problém? Ne! Jako kreativní inženýr, je můj čas se předvést!

Vypadá roztomile, že? Koukněte na následující video pro detaily přeměny.
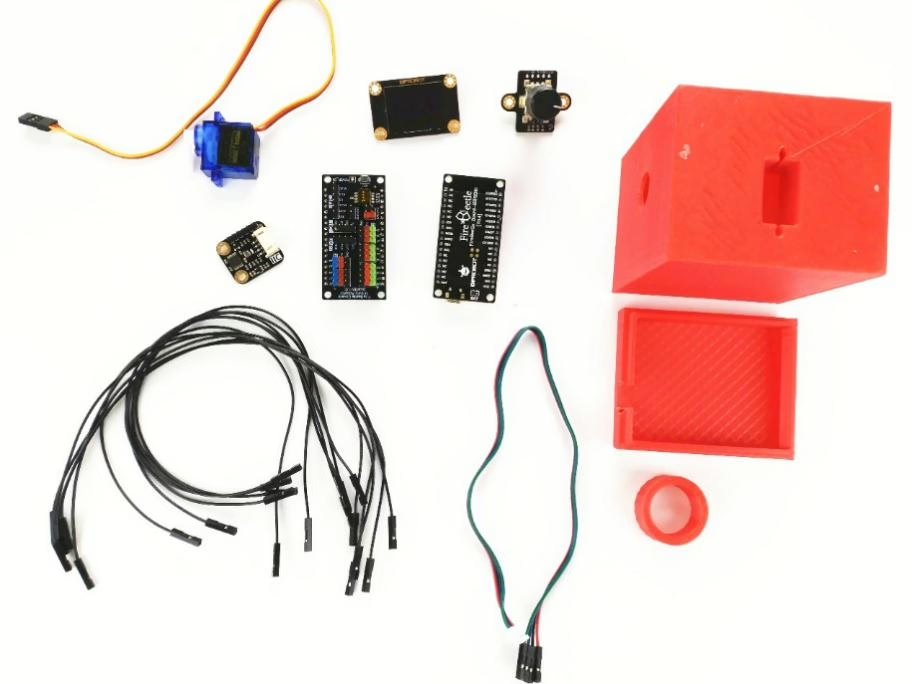
Potřebné vybavení
1 x FireBeetle ESP32 IOT Mikrokontroler (podporuje Wi-Fi a Bluetooth)
1 x FireBeetle Pouzdro Gravity I/O Expansion Shield
1 x Gravity: I2C OLED-2864 displej
1 x BME teplotní-vlhkostní senzor
1 x EC11J rotační kodér
1 x 9g mikro servo (1.6 kg) (SKU:SER0006)
10 x kablík Dupot
1 x Pouzdro od Overlord 3D tiskárny
Není potřeba pájet po celou dobu práce.
Propojení zařízení:
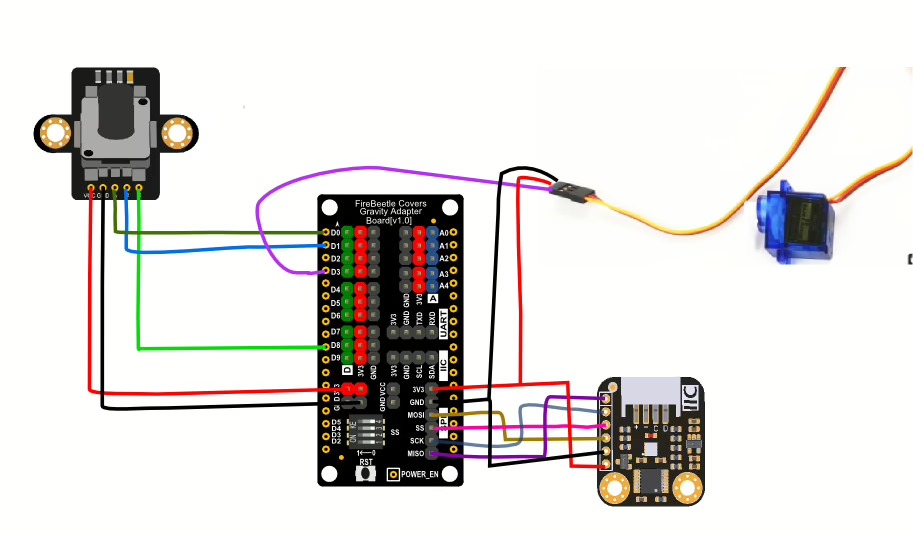
Připojte I2C rozhraní OLED12864 přímo na I2C rozhraní Gravity Expansion shield. Poté připojte pin A z rotačního kodéru EC11J na D0, pin B na D1 a pin C na D8. Následně připojte mikro servo na D3 a SPI rozhraní BME280 přímo na SPI rozhraní Gravity Expansion shield, CS (chip select) na D5.
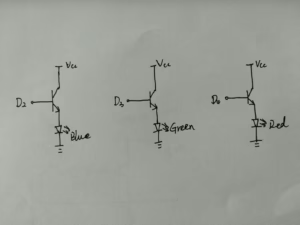
Schéma obvodu je níže:
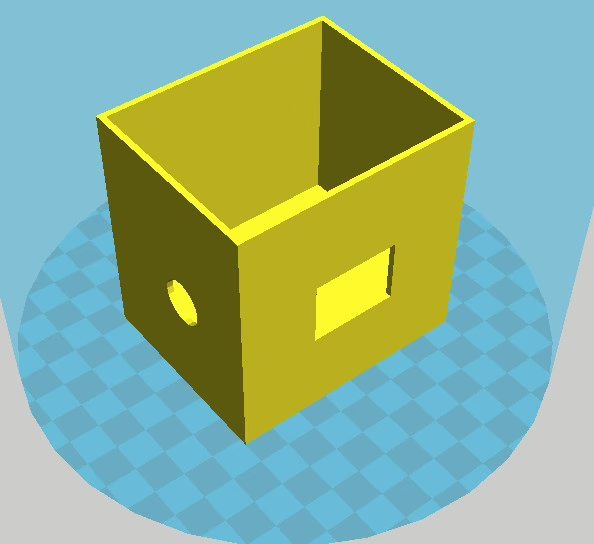
Pracovní proces:
Vytiskněte pouzdro na 3D tiskárně. Klikněte sem pro stažení programu a zdrojového kódu pro 3D tisk.
Připevněte rotační enkodér na pouzdro.


Připevněte OLED2864 na pouzdro. Připojte OLED displej na I2C rozhraní desky Gravity pomocí kablíků Dupont.
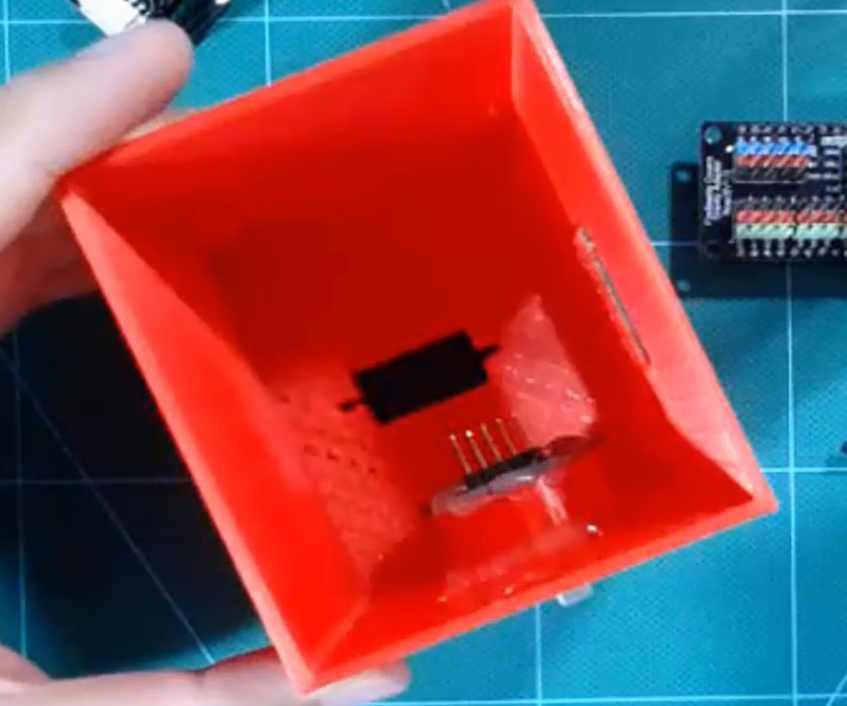
Připojte BME280. Senzor BME280 používá rozhraní SPI. Jeho zapojení je naznačeno ve schématu výše.
Umístěte větrák.
Odstraňte lithiovou baterii a připojte napájení větráku na zdroj a na GND (zem) desky FireBeetle ESP8266. Poté připojte lithiové baterie k FireBeetle ESP8266. Nakonec připojte mikro servo na D3.


Dokončete montáž přístroje.
Přiklopte spodní část, připevněte ho horkým lepidlem a stáhněte si následující program:
#include // Only needed for Arduino 1.6.5 and earlier
#include
#include „SSD1306.h“ // alias for `#include „SSD1306Wire.h“`
#include „OLEDDisplayUi.h“
#include „images.h“
#include
#include
#define SEA_LEVEL_PRESSURE 1013.25f
#define BME_CS D5
SimpleTimer timer;
int timeCounter = 0;
boolean uiEnable = true;
DFRobot_BME280 bme(BME_CS); //SPI
SSD1306 display(0x3c, D7, D6);
Servo mymotor;
OLEDDisplayUi ui( &display );
enum model{
MODEL_NULL,
MODEL_LEFT,
MODEL_RIGHT,
MODEL_BUTTON
};
enum setFrame{
SET_NULL,
SET_FRAME_2_ON,
SET_FRAME_2_OFF,
SET_FRAME_3_ON,
SET_FRAME_3_OFF
};
enum motorModel{
MOTOR_AUTO,
MOTOR_STATIC
};
char commondModel = MODEL_NULL;
char setFrameValue = SET_NULL;
char motorState = MOTOR_STATIC;
int encoderPinA = D0;
int encoderPinB = D1;
int buttonPin = D8;
volatile int lastEncoded = 0;
volatile long encoderValue = 0;
long lastencoderValue = 0;
int lastMSB = 0;
int lastLSB = 0;
int speedValue = 5;
int angleValue = 90;
boolean dir = true;
int frameIndex = 0;
long readEncoderValue(void){
return encoderValue/4;
}
boolean isButtonPushDown(void){
if(!digitalRead(buttonPin)){
delay(5);
if(!digitalRead(buttonPin)){
while(!digitalRead(buttonPin));
return true;
}
}
return false;
}
void msOverlay(OLEDDisplay *display, OLEDDisplayUiState* state) {
if(frameIndex == 0)
return;
display->setTextAlignment(TEXT_ALIGN_RIGHT);
display->setFont(ArialMT_Plain_10);
display->drawString(128, 0, String(angleValue));
}
void drawFrame1(OLEDDisplay *display, OLEDDisplayUiState* state, int16_t x, int16_t y) {
display->setTextAlignment(TEXT_ALIGN_LEFT);
display->setFont(ArialMT_Plain_24);
display->drawString(15 + x, 10+ y, „ChoCho“);
}
void drawFrame2(OLEDDisplay *display, OLEDDisplayUiState* state, int16_t x, int16_t y) {
float temp = bme.temperatureValue();
float pa = bme.pressureValue();
float hum = bme.altitudeValue(SEA_LEVEL_PRESSURE);
float alt = bme.humidityValue();
// Demonstrates the 3 included default sizes. The fonts come from SSD1306Fonts.h file
// Besides the default fonts there will be a program to convert TrueType fonts into this format
display->setTextAlignment(TEXT_ALIGN_LEFT);
display->setFont(ArialMT_Plain_16);
display->drawString(x, y,String(„Temp: „)+String(temp));
display->drawString(x, 17 + y, String(„Hum: „)+String(alt));
display->drawString(x, 34 + y, String(„Pa: „)+String(pa));
}
void drawFrame3(OLEDDisplay *display, OLEDDisplayUiState* state, int16_t x, int16_t y) {
// Text alignment demo
display->setFont(ArialMT_Plain_16);
// The coordinates define the left starting point of the text
display->setTextAlignment(TEXT_ALIGN_LEFT);
display->drawString(x, y, „Set Speed“);
display->drawString(40+x, y+17,String(speedValue));
}
void drawFrame4(OLEDDisplay *display, OLEDDisplayUiState* state, int16_t x, int16_t y) {
// Text alignment demo
display->setFont(ArialMT_Plain_16);
// The coordinates define the left starting point of the text
display->setTextAlignment(TEXT_ALIGN_LEFT);
display->drawString(x, y, „FAN Model“);
if(motorState == MOTOR_STATIC){
display->drawString(40+x, y+27,“STATIC“);
}else if(motorState == MOTOR_AUTO){
display->drawString(40+x, y+27,“AUTO“);
}
}
// This array keeps function pointers to all frames
// frames are the single views that slide in
FrameCallback frames[] = { drawFrame1, drawFrame2, drawFrame3, drawFrame4};
// how many frames are there?
int frameCount = 4;
// Overlays are statically drawn on top of a frame eg. a clock
OverlayCallback overlays[] = { msOverlay };
int overlaysCount = 1;
void ec11Init(void){
pinMode(encoderPinA, INPUT);
pinMode(encoderPinB, INPUT);
pinMode(buttonPin, INPUT);
digitalWrite(encoderPinA, HIGH); //turn pullup resistor on
digitalWrite(encoderPinB, HIGH); //turn pullup resistor on
attachInterrupt(D0, updateEncoder, CHANGE);
attachInterrupt(D1, updateEncoder, CHANGE);
}
void displayInit(void){
ui.setTargetFPS(60);
ui.setActiveSymbol(activeSymbol);
ui.setInactiveSymbol(inactiveSymbol);
ui.setIndicatorPosition(BOTTOM);
ui.setIndicatorDirection(LEFT_RIGHT);
ui.setFrameAnimation(SLIDE_LEFT);
ui.setFrames(frames, frameCount);
ui.setOverlays(overlays, overlaysCount);
ui.disableAutoTransition();
ui.switchToFrame(frameIndex);
ui.init();
display.flipScreenVertically();
}
void motorInit(void){
mymotor.attach(D3);
mymotor.write(speedValue);
}
void updateUi(void){
if(timeCounter>50){
display.displayOff();
uiEnable = false;
}else{
display.displayOn();
uiEnable = true;
timeCounter++;
}
if(commondModel == MODEL_RIGHT){
frameIndex++;
if(frameIndex > 3)
frameIndex = 0;
ui.switchToFrame(frameIndex);
}else if(commondModel == MODEL_LEFT){
frameIndex–;
if(frameIndex < 0)
frameIndex = 3;
ui.switchToFrame(frameIndex);
}
commondModel = MODEL_NULL;
}
void updateMotor(void){
if(motorState == MOTOR_AUTO){
if(dir == true){
angleValue += speedValue;
}else{
angleValue -= speedValue;
}
}
if(angleValue > 180)
dir = false;
else if(angleValue < 0)
dir = true;
mymotor.write(angleValue);
}
void doButton(void){
if(isButtonPushDown()){
if(uiEnable == false){
commondModel = MODEL_NULL;
}else{
commondModel = MODEL_BUTTON;
}
timeCounter = 0;
}
if(readEncoderValue()!=0){
long value = readEncoderValue();
if(uiEnable == true){
if(value > 0){
commondModel = MODEL_RIGHT;
}else{
commondModel = MODEL_LEFT;
}
}
timeCounter = 0;
encoderValue = 0;
}
if(frameIndex == 2){
if(commondModel == MODEL_BUTTON){
if(setFrameValue == SET_FRAME_2_ON){
setFrameValue = SET_FRAME_2_OFF;
}else{
setFrameValue = SET_FRAME_2_ON;
}
commondModel = MODEL_NULL;
}
if(setFrameValue == SET_FRAME_2_ON){
if(commondModel == MODEL_RIGHT){
speedValue++;
}else if((commondModel == MODEL_LEFT)){
speedValue–;
}
if(speedValue > 20)
speedValue = 20;
if(speedValue < 0)
speedValue = 0;
commondModel = MODEL_NULL;
}
}
if(frameIndex == 3){
if(commondModel == MODEL_BUTTON){
if(setFrameValue == SET_FRAME_3_ON){
setFrameValue = SET_FRAME_3_OFF;
}else{
setFrameValue = SET_FRAME_3_ON;
}
commondModel = MODEL_NULL;
}
if(setFrameValue == SET_FRAME_3_ON){
if((commondModel == MODEL_RIGHT) || (commondModel == MODEL_LEFT)){
motorState = (motorState==MOTOR_AUTO)?MOTOR_STATIC:MOTOR_AUTO;
}
commondModel = MODEL_NULL;
}
}
}
void setup() {
ec11Init();
displayInit();
motorInit();
bme.begin();
timer.setInterval(200,updateUi);
timer.setInterval(50,updateMotor);
}
void loop(){
int remainingTimeBudget = ui.update();
if (remainingTimeBudget > 0) {
delay(remainingTimeBudget);
}
doButton();
timer.run();
}
void updateEncoder(){
int MSB = digitalRead(encoderPinA); //MSB = most significant bit
int LSB = digitalRead(encoderPinB); //LSB = least significant bit
int encoded = (MSB << 1) |LSB; //converting the 2 pin value to single number
int sum = (lastEncoded << 2) | encoded; //adding it to the previous encoded value
if(sum == 0b1101 || sum == 0b0100 || sum == 0b0010 || sum == 0b1011) encoderValue ++;
if(sum == 0b1110 || sum == 0b0111 || sum == 0b0001 || sum == 0b1000) encoderValue –;
if(uiEnable == false)
encoderValue = 0;
lastEncoded = encoded; //store this value for next time
}
Skvěle. Máme hotovo!
Originální článek je dostupný zde.





{kind=link}
{kind=link}
Žádné sociální komentáře k dispozici.