
Když se řekne radar, většina lidí si představí kovovou mísu na střeše letiště nebo obří vojenskou instalaci obklopenou ostnatým drátem. Přitom fyzikální princip není složitější než sonar v parkovacích senzorech auta – vysílám elektromagnetický impulz, čekám na odrážené echo, z doby letu vypočítám vzdálenost. Co je ale za horizont běžného kutila, je zpracování signálu v reálném čase, přesná syntéza frekvencí a řízení fáze desítek anténních prvků.
Na projekt upozornil Martin Wolker.
Projekt AERIS-10 (zkratka z Array Electronic Radar with Integrated System) se pouští do vývoje vlastního, domácího, radaru – a všechno dává k dispozici zdarma. Schémata, layout (DPS), firmware pro FPGA i mikrokontrolér, simulace, BOM. Všechno na github.
Proč 10,5 GHz? Toto pásmo (X-band) je historicky oblíbené pro meteorologické radary a dálniční rychloměry – součástky pro tuto frekvenci jsou relativně dostupné a máme k nim hotové antény i referenční návrhy. Vlnová délka (~2,9 cm) navíc umožňuje rozumně malé anténní soustavy s dobrým prostorovým rozlišením.
Upozornění: provoz radaru v X-pásmu vyžaduje v ČR oprávnění ČTÚ.
Dvě verze radaru
Projekt existuje ve dvou vývojových větvích, které se liší výkonem, složitostí a zamýšleným použitím. Oba sdílejí základní architekturu, ale liší se anténní soustavou a výkonovými stupni.
| Parameter | AERIS-10N (Nexus) | AERIS-10X (Extended) |
|---|---|---|
| Frequency | 10.5 GHz | 10.5 GHz |
| Max Range | 3 km | 20 km |
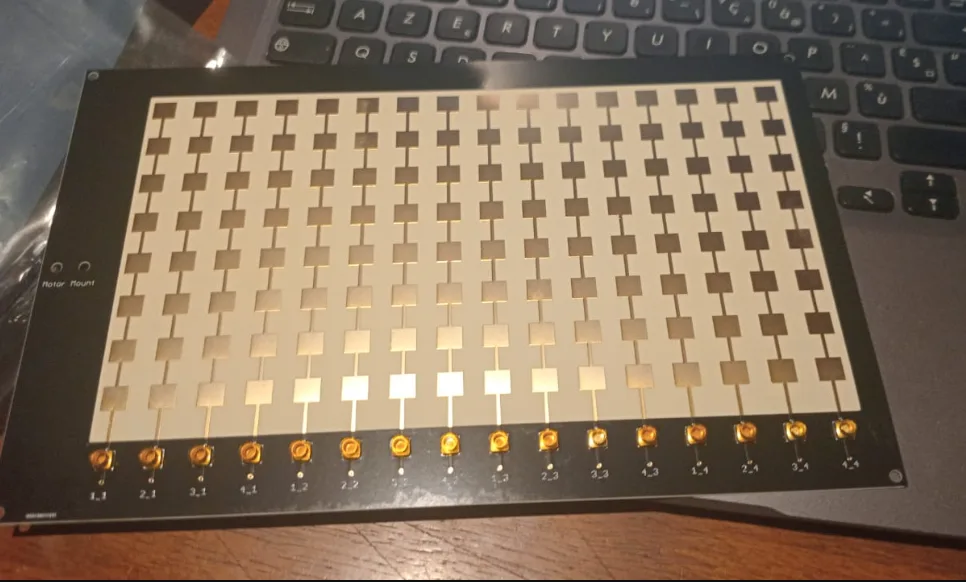
| Antenna | 8×16 Patch Array | 32×16 Slotted Waveguide |
| Beam Steering | Electronic (±45°) | Electronic (±45°) |
| Mechanical Scan | 360° (stepper motor) | 360° (stepper motor) |
| Output Power | ~1W×16 | 10W×16 (GaN amplifier) |
| Processing | FPGA + STM32 | FPGA + STM32 |
Verze Nexus cílí na výzkumníky a pokročilé nadšence, kteří chtějí experimentovat s tvorbou radarového svazku (beamforming) a zpracováním signálu bez nutnosti stavět výkonové GaN zesilovače. Verze Extended přidává šestnáct samostatných PA desek s čipem QPA2962 – každý zvládne až 10 W ve vlnovodovém pásmu X, výsledný EIRP dělá z AERIS-10X seriózní měřicí přístroj.
Architektura: co je uvnitř
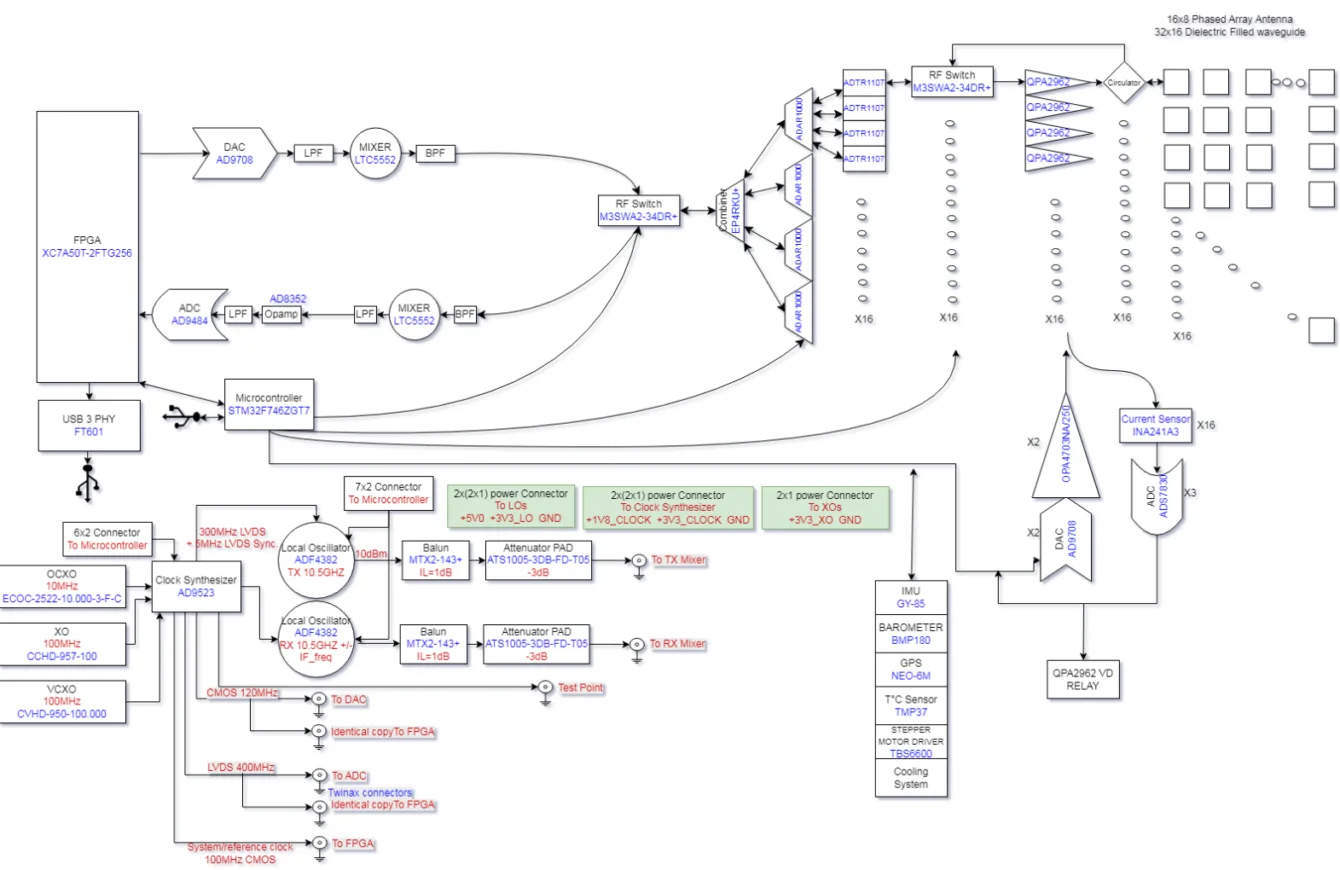
Hardware je rozdělen do samostatných modulů. Hlavní páteř zařízení tvoří tři moduly.
1. Deska správy napájení
Radar je energeticky velmi náročný – různé části obvodu vyžadují různá napětí a hlavně správné pořadí spouštění. Napájecí deska se stará o filtraci, sekvencování a monitorování. O logiku spouštění se stará mikrokontrolér STM32F746.
2. Frekvenční syntezátor
Srdcem celého systému z hlediska frekvencí je generátor hodinového signálu AD9523-1 od Analog Devices. Tento obvod distribuuje fázově sladěné reference na DAC, ADC, FPGA a RX+TX frekvenční syntezátory (ADF4382), které generují lokální oscilátor pro směšovače. Fázová koherence je pro radarový signál naprosto klíčová – bez ní by Dopplerovské zpracování nefungovalo.
3. Hlavní deska (RF + digitál)
Tady se děje vše zajímavé. DAC generuje LFM čirpy (o tom za chvíli), směšovače LT5552 konvertují signál do mikrovlnného pásma a zpět, čtyři čtyřkanálové fázové posunovače ADAR1000 řídí fázi šestnácti anténních prvků – a to vše pod dozorem FPGA Xilinx XC7A100T (Artix-7) a STM32 mikrokontroléru.
LFM: triky radaru
Zkratka PLFM v názvu projektu znamená Pulse Linear Frequency Modulated – pulzní radar s lineární frekvenční modulací. Co to vlastně je.
Klasický pulzní radar vyšle krátký obdélníkový impulz a čeká na odrážený signál – echo. Kratší impulz = lepší rozlišení vzdálenosti, ale zároveň méně energie v paprsku = menší dosah. LFM toto dilema elegantně řeší: vyšle se relativně dlouhý impulz, ale jeho frekvence se během trvání lineárně mění (typicky narůstá) – proto čirp, od anglického cvrlikání. Po přijetí se echo zpracuje pulsní kompresí v korelátoru, který smrskne dlouhý impulz na úzký špičku s výborným SNR. Výsledek: dobrý dosah i dobré rozlišení zároveň.
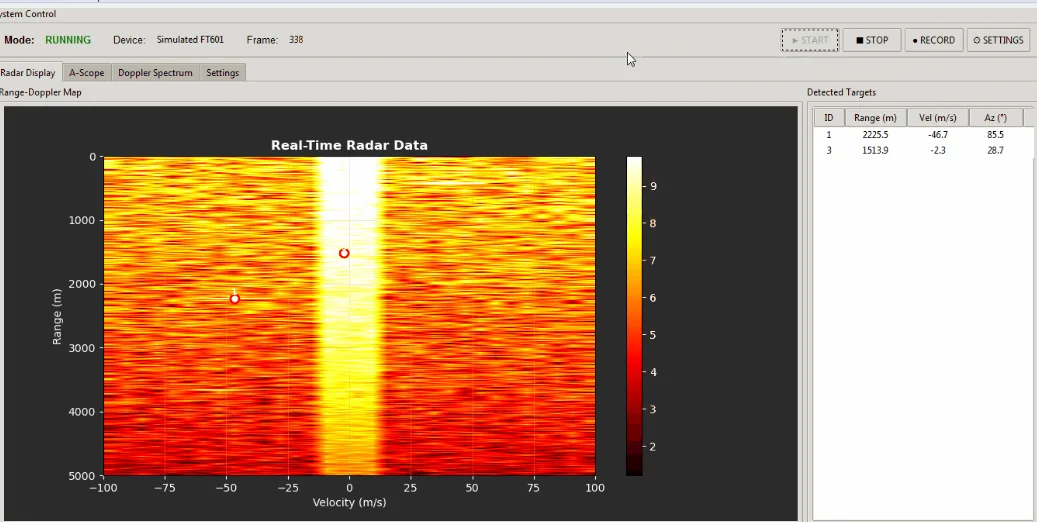
FPGA v AERIS-10 implementuje celý zpracovací řetězec v Verilogu — od surových ADC dat přes převod I/Q, decimaci a filtraci (CIC + FIR) až po FFT, pulsní kompresi, Dopplerovské zpracování, MTI filtr a detektor CFAR.
Fázované pole: směrování pole bez pohyblivých částí
Klíčová technologie AERIS-10 využívá elektronické natáčení svazku — phased array beamforming. Místo toho, aby se anténa fyzicky otáčela (to sice umí taky, pomocí krokového motoru na 360°), mění se fáze signálu na každém prvku soustavy. Princip je stejný jako vlnění na vodní hladině: pokud více zdrojů vln vyzařuje s různým zpožděním, výsledná vlna může být nasměrována libovolným směrem.
Směr svazku: +19.5°
Čip ADAR1000 od Analog Devices je čtyřkanálový fázový posunovač s 6bitovým rozlišením — každý ze 64 kroků odpovídá pootočení o 5,625°. AERIS-10 jich používá čtyři pro šestnáct anténních prvků (TX i RX zvlášť). Výsledkem je elektronické natáčení v rozsahu ±45° v azimutu i elevaci bez jediného pohyblivého dílu.
Shrnutí
AERIS-10 je pozoruhodný projekt ze tří důvodů.
Za prvé, technická hloubka: od RF frontendu přes FPGA DSP až po Python GUI — žádná část není schovaná za black box.
Za druhé, modularita: lze začít jedním podsystémem a postupně přidávat.
Za třetí, otevřenost: MIT licence znamená, že výsledky vaší práce jsou skutečně vaše.
Výstavba kompletního systému není pro začátečníky — vyžaduje zkušenosti s osazováním BGA a QFN pouzder, přístup k RF testovacímu vybavení a solidní znalost Vivado. Ale jako studijní materiál pro pochopení moderních radarových systémů je AERIS-10 jednoduše bezkonkurenční.
Github projektu https://github.com/NawfalMotii79/PLFM_RADAR?tab=readme-ov-file
Projekt je velmi komplexní a obsáhlý, ale zároveň neskutečně zajímavý. Článek proto zpracoval Claude AI s tím, že jsem se snažil opravit zjevné chyby. Snad jsem našel všechny :)







{kind=link}
{kind=link}
Komentáře na sítích